Основы автоматического
регулирования
1.3.
Основные термины и определения
Теория автоматического управления (ТАУ), современные системы управления технологическими процессами характеризуются большим количеством и разнообразием технологических параметров, систем регулирования и обьектов регулирования.
1.2.1 Параметр
технологического процесса – физическая величина технологического процесса,
например, температура, давление,
расход, уровень, обьем, масса, рН, напряжение и т.д. На рис.1.1 данная величина указана как X
или PV=X, где PV
– Process Variable –
переменная процесса. Данный параметр называется входным
воздействием (Х) -
подаваемым на вход системы или устройства управления. 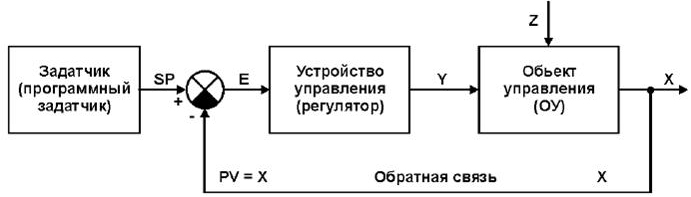
1.2.2 Параметр технологического процесса, который необходимо
поддерживать постоянным, или изменять по заданной программе, или
изменять по определенному закону, называется - регулируемым параметром.
Значение регулируемой величины в рассматриваемый момент времени
называется мгновенным значением. Значение регулируемой величины,
полученное в рассматриваемый момент времени на основании данных
некоторого измерительного прибора называется ее измеренным значением.
Измеряемый и (или) регулируемый параметр технологического процесса
может преобразовываться первичным прибором (датчиком) в какой-либо
унифицированный сигнал. Если датчик выдает неунифицированный сигнал
(например, термопары, термопреобразователи сопротивления, тензодатчики
и др.), то для приведения его к стандартному диапазону должен быть
установлен соответствующий нормализатор (преобразователь) сигналов.
Также можно использовать измерители-регуляторы с универсальным входом,
которые поддерживают подключение большинства наиболее распространенных
типов первичных приборов (датчиков) без использования нормализаторов
сигналов.
1.2.3 Обьект управления (ОУ) или обьект регулирования
– устройство, требуемый режим работы которого должен поддерживаться
извне специально организованными управляющими воздействиями.
1.2.4
Управление – формирование управляющих воздействий по определенному
закону, обеспечивающих требуемый режим работы ОУ.
1.2.5 Автоматическое управление – управление, осуществляемое
без непосредственного участия человека.
1.2.6 Регулятор – устройство, обеспечивающее поддержание заданного
значения (SP) регулируемой величины (PV) или автоматическое изменение ее по заданному закону.
1.2.7 Задача регулирования – доведение выходной величины X обьекта
регулирования до заранее определенного значения SP и удержания ее на данном значении с
учетом влияния возмущающих воздействий.
1.2.8 Система автоматического регулирования (САР) – автоматическая
система с замкнутой цепью воздействия (см. рис.1.1), в котором управление Y вырабатывается
в результате сравнения истинного значения (PV=X) с заданным значением SP. Основное назначение
САР заключается в поддержании заданного постоянного значения регулируемого параметра или изменение
его по определенному закону.
1.2.9 Дополнительная связь в структурной схеме САР (см. рис.1.1),
направленная от выхода к входу, называется обратной связью (ОС). Обратная связь может быть отрицательной
или положительной.
1.2.10 Выходное воздействие (Y) – воздействие, выдаваемое на
выходе системы управления или устройства регулирования. В литературе по автоматизации также встречаются аббревиатуры,
соответствующие данному определению:
MV – Manipulated Variable – регулируемая (выходная) переменная,
CO – Controlled Output - регулируемая (выходная) переменная или
мощность.
1.2.11 Задающее воздействие (SP – Set Point Value, W, Wx, Wv)
– воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
1.2.12 Возмущающее воздействие (Z) – воздействие, стремящееся
нарушить функциональную связь между задающим воздействием и регулируемой величиной.
Главное назначение систем автоматической стабилизации – компенсация
внешних возмущающих воздействий.
1) Виды возмущающих воздействий, действующие на систему стабилизации
(систему управления) приведены в следующей таблице 1.1.1